

 Оценка: 4,11 (голосов: 9)
Оценка: 4,11 (голосов: 9)
БПЛА «Беркутчи» — начало

Результатом работы над проектом БПЛА «Беркутчи» стал летающий прототип, прошедший испытания на базе Мичуринского Аграрного Университета по аэрофотосъёмке сельхозугодий. БПЛА сочетал в себе гироскопический и пирометрический способ ориентации.
БПЛА был назван именно так потому что по условиям ТЗ и в силу глубоких убеждений команды стартовать сия вундервафля должна была только с руки, без использования пусковых установок, а садиться на брюхо в снег или траву. Основным способом ориентации остался пирометрический.

Как и у ранних версий БПЛА, бортовая электроника была разделена на модули «Пилот» и «Штурман». В то время появились уже трёхосевые МЭМС гироскопы, магнитометры и акселерометры, поэтому гироскоп, аксель, магнитометр и пирометры были вынесены в отдельный блок — пироголовку — где также был установлен микроконтроллер для первичной обработки данных.
Структурная схема бортовой аппаратуры управления представлена ниже. Сорян за качество коллажа, использую картинки тех лет, а перерисовывать их мне лень 🙂
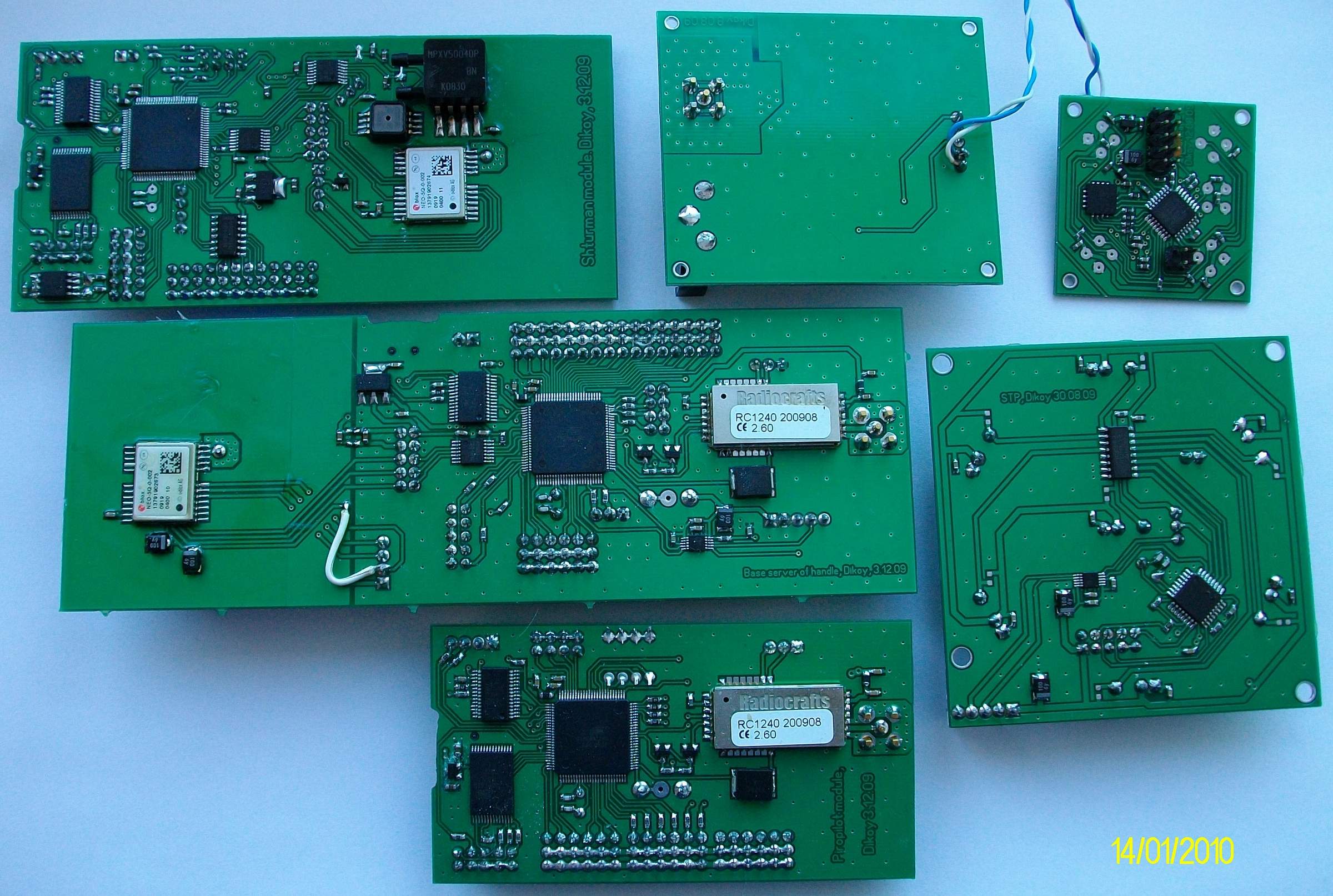
Весь комплект аппаратуры БПЛА представлен ниже. Помимо плат «Пилота», «Штурмана» и пироголовки, тут видно также GPS/Глонасс модуль от Навис, а также систему точной посадки.

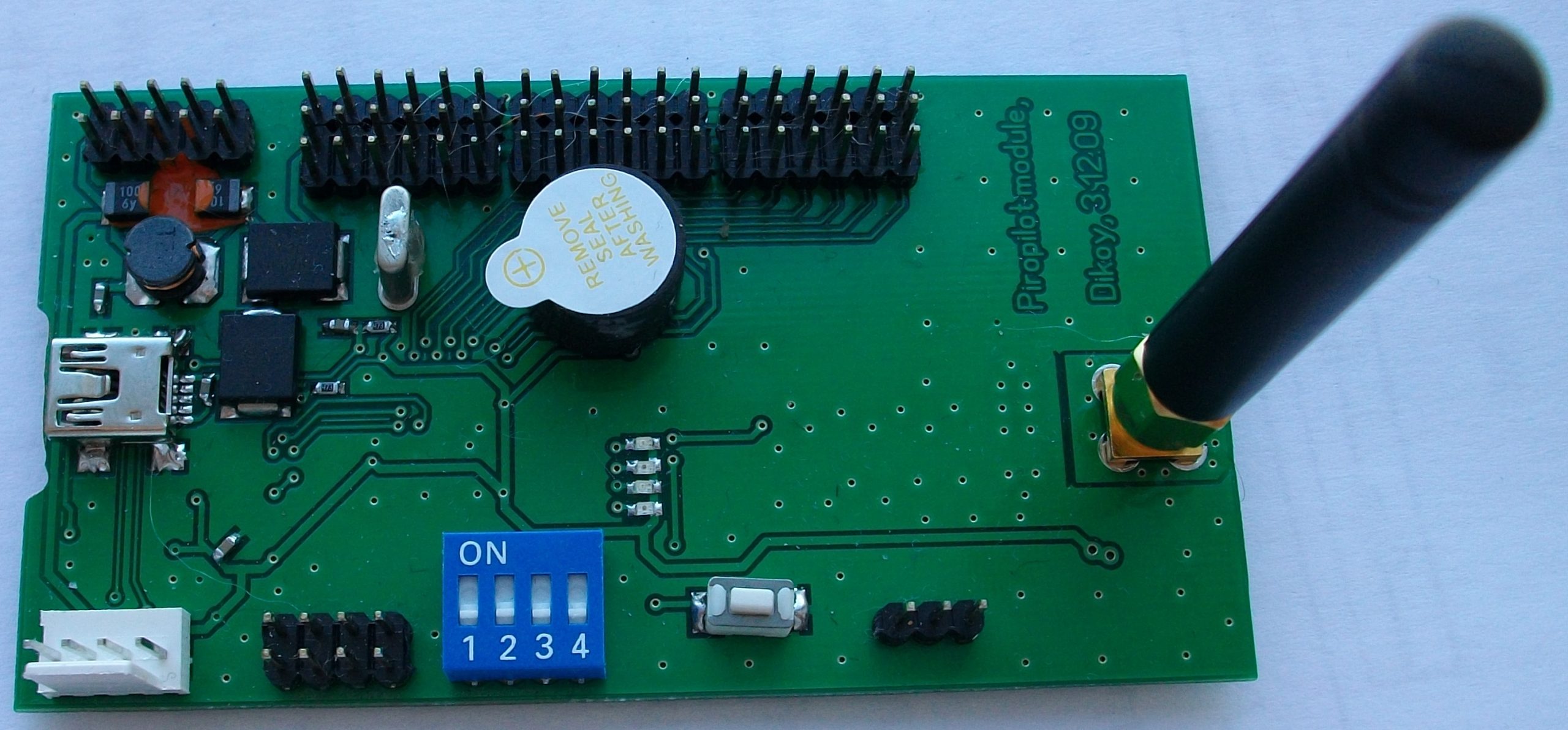
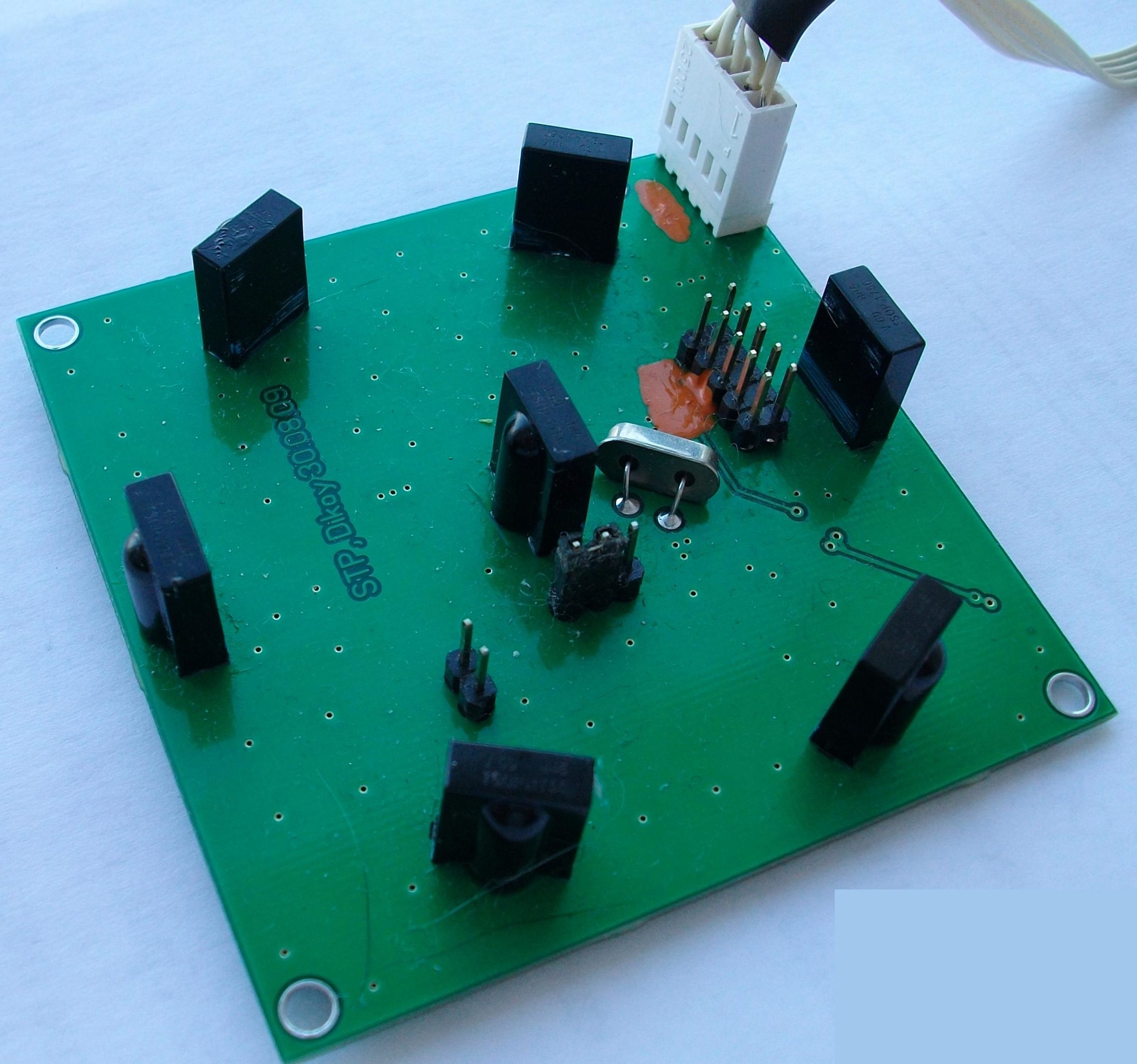
Начнём с пироголовки.

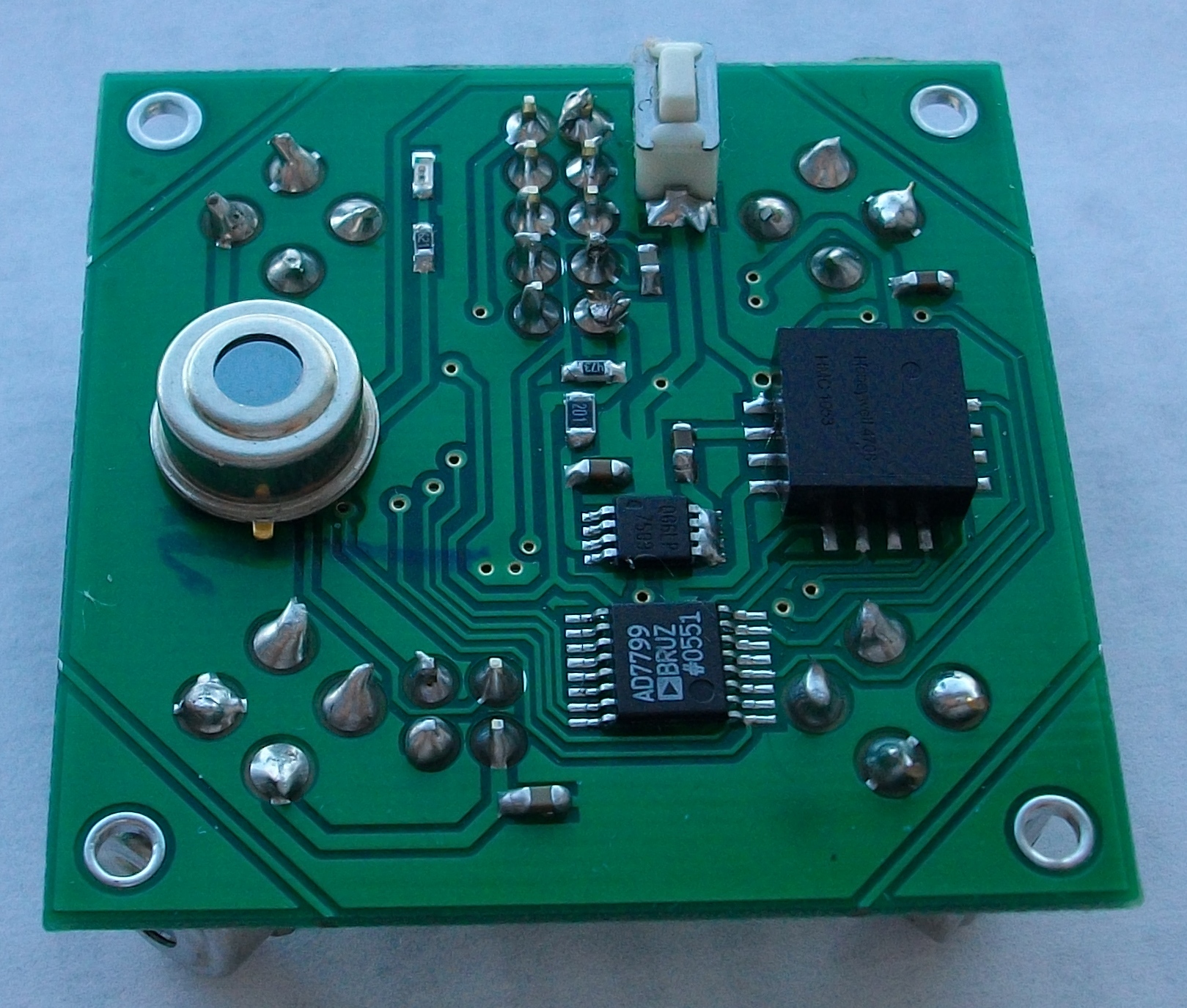
У данной версии пироголовки отсутствует гироскоп, потому что с ней использовалась разработанная ранее БСО, но были версии и с гироскопом.
Пирометры применены цифровые, melexis MLX90614. Это I2C пирометры и с завода имеют одинаковый адрес (в поздних моделях адрес стало можно менять), поэтому они соединены параллельно и читаются программным I2C, реализованном на прерываниях. На плате установлено 5 пирометров, а ещё один цеплялся на проводе и устанавливался снизу БПЛА. Таким образом, 6 пирометров обеспечивали круговой обзор БПЛА и избавляли от необходимости первичных калибровок перед полётом, а также адаптировался к изменению условий в течение полёта.
Для считывания акселерометра хватало разрешения встроенного АЦП в ATmega88, а вот магнитометру пришлось ставить АЦП высокого разрешения и с дифференциальным входом. Данные предварительно обрабатывались, собирались в пакеты и передавались «Пилоту» через SPI интерфейс, по совместительству бывший и разъёмом программирования.
Модуль «Пилот», как и ранее, осуществлял ориентацию и управление БПЛА в полёте. Для этого у него был радиомодем, 6 входов и 12 выходов PPM сигнала для подключения приёмника радиоуправления и серв, память для логов и USB интерфейс для их считывания, интерфейс с пироголовкой и «Штурманом». В маленькой и беззащитной АВРке крутился полноценный Калман, переделанный под целочисленные вычисления и с тригонометрией на CORDIC.
Штурман обрабатывал более медленные, но и более точные сигналы. Это, прежде всего, GPS приёмник и датчики давления (высоты и воздушной скорости).
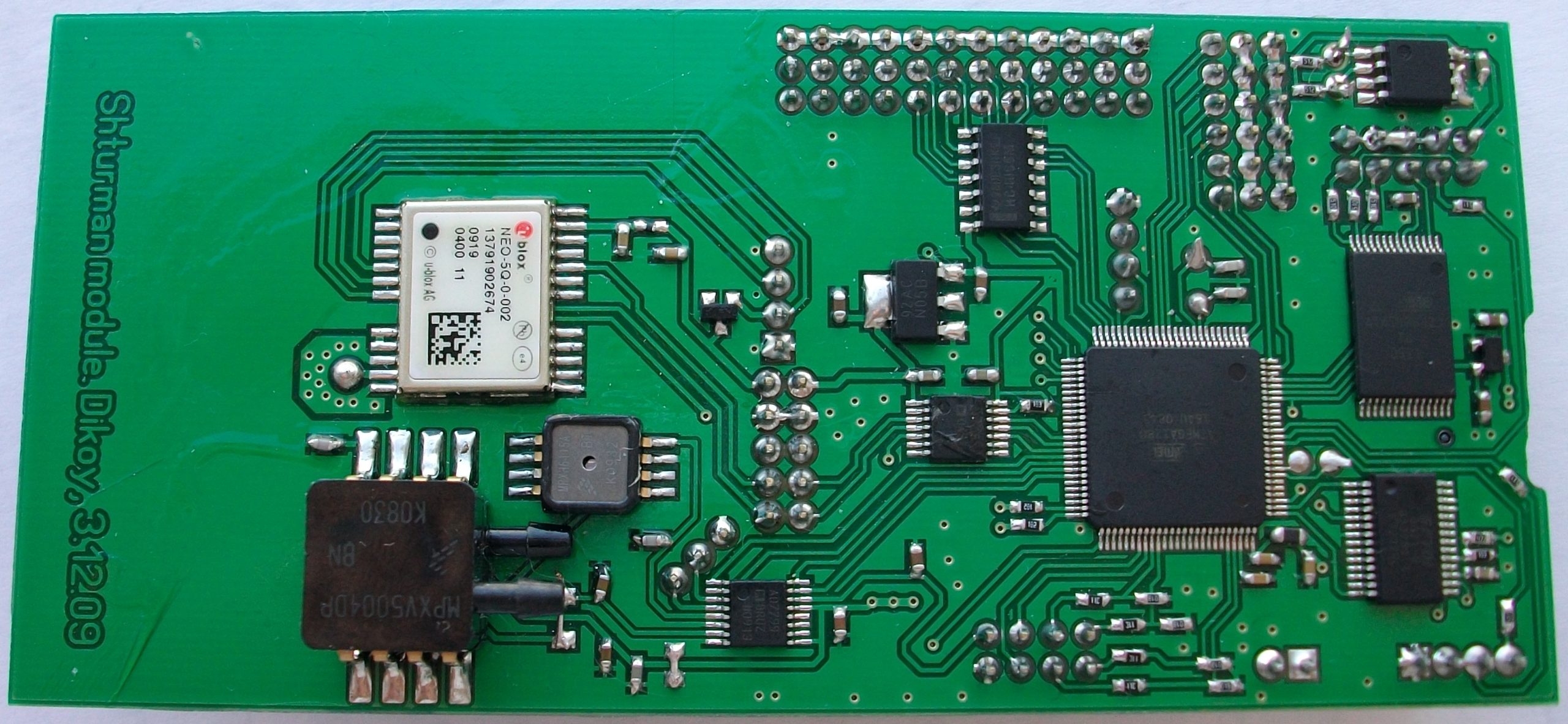
Данный модуль интересен тремя решениями. Первое, это IrDA канал, имевший сразу две функции — управления фототехникой и осуществления точной посадки (об этом ниже). Второе, это биполярные ключи на 74HC4066 — если фототехника не имела интерфейсов управления, то можно было вскрыть крышку и подпаяться к кнопкам, а биполярность ключей обеспечивала нечувствительность к полярности подключения подтяжек кнопок и даже с матричными клавиатурами всё работало. Третье, это GPS модуль на разъёме, который можно было отключить и подключить ГЛОНАСС модуль от Навис.
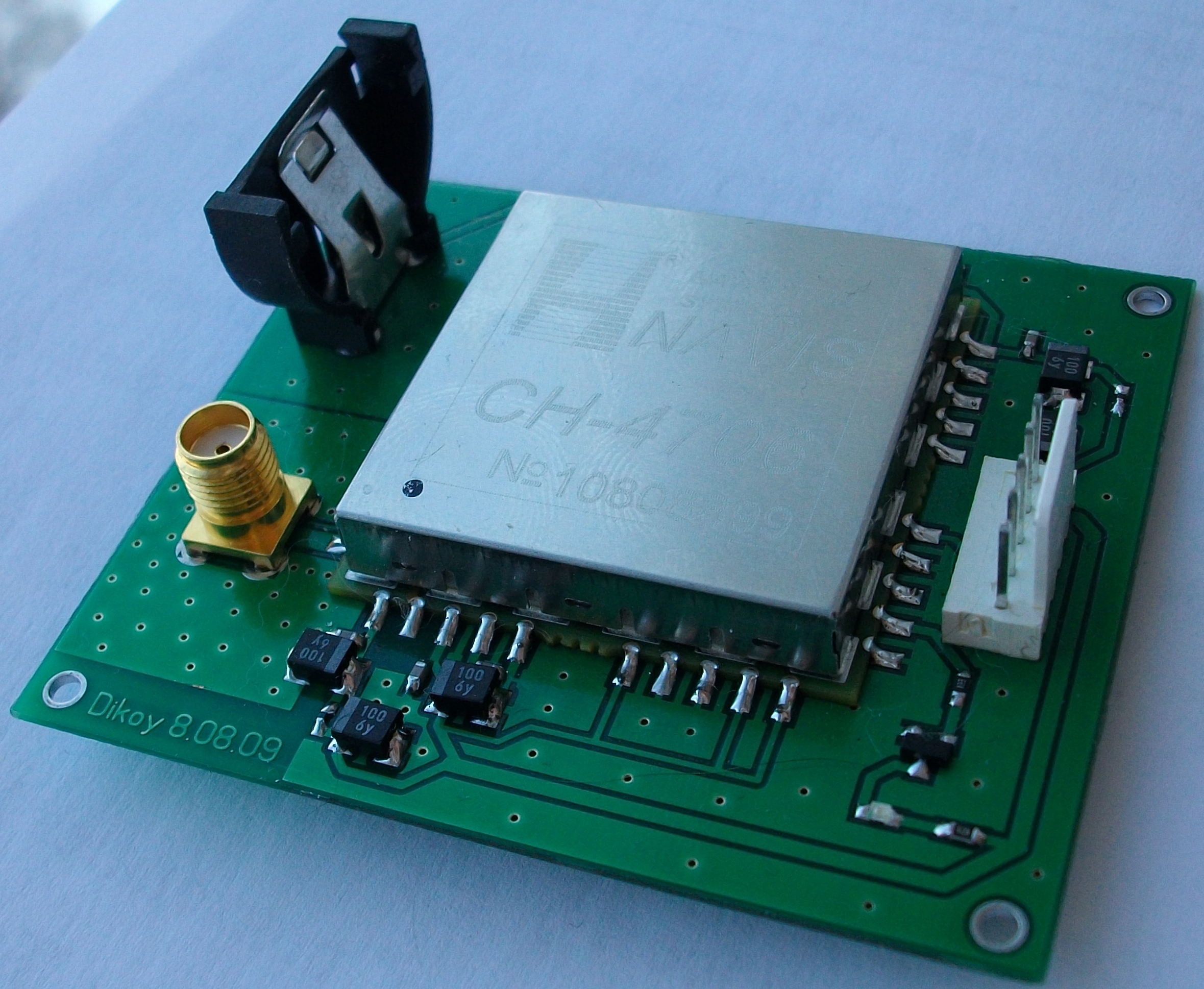
Уже тогда подул ветер импортозамещения и переход на Глонасс был актуален. Модуль, кстати, работал очень хорошо и в раздельном режиме (только GPS и только Глонасс), и в комплексированном.
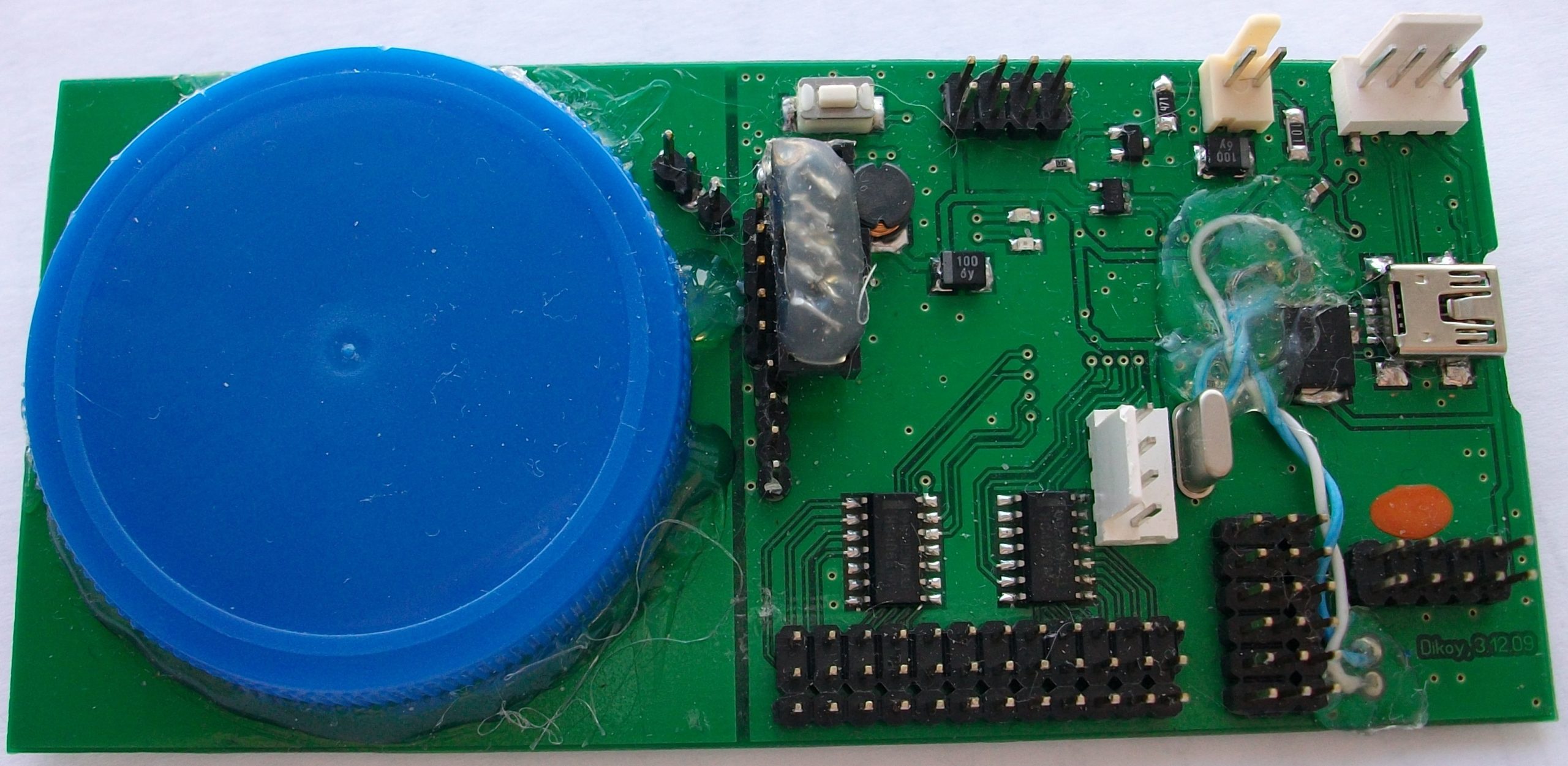
Конечно, для БПЛА нужна была наземная станция. Она, во многом, повторяла штурмана своей начинкой, только GPS модуль здесь можно было уже полностью отпилить и оставить только Навис.


Наземная станция имела входы для подключения потенциометров осей джойстика (штурвала), выходы на сервы для управления следящей антенной (наведение осуществлялось по координатам, передаваемым с борта) и поддерживала точную посадку.
Система точной посадки была устроена донельзя просто. Основой являлся блок IrDA приёмников, закрытый сверху непрозрачным кожухом, обеспечивающим каждому датчику узкий сектор обзора. Самый узкий сектор был у верхнего датчика.
На борту ЛА находился излучатель ИК сигнала, который принимался датчиком СТП. Таким образом осуществлялся захват и ведение БПЛА по посадочному курсу. В случае перелёта засвечивался верхний датчик, в этот момент происходила взаимопрявязка координат наземной станции и борта. Даже с учётом ухода микромеханических гироскопов, запаса точности хватало для посадки после такой привязки.
Если же посадку осуществлял коптер, то всё намного упрошалось — ему всего лишь надо было зайти на центральный датчик и сесть используя ультразвуковой или лазерный высотомер.
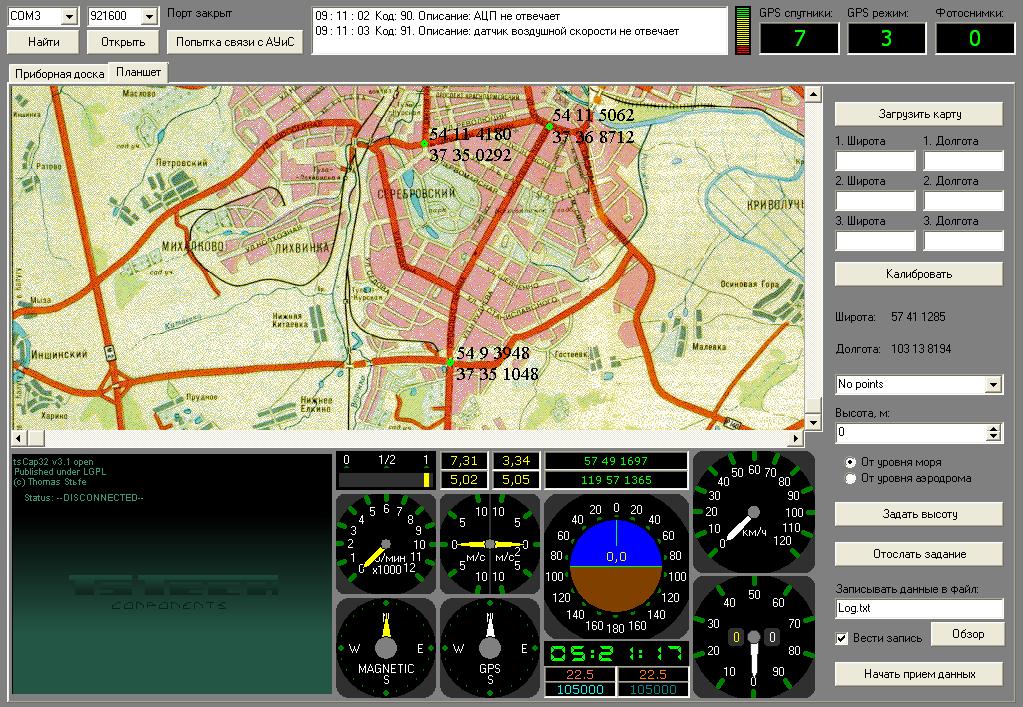
К наземной станции полагалось ПО, на котором отображались основные параметры полёта и карта. В левый нижний угол транслировалось изображение с бортовой камеры.
В роли носителя изначально использовался верхнеплан от мультиплекса. Под его габариты и делались платы, встававшие внутри этажеркой. Это был очень стабильный и грузоподъёмный самолёт, и с него получались хорошие фотопланы.


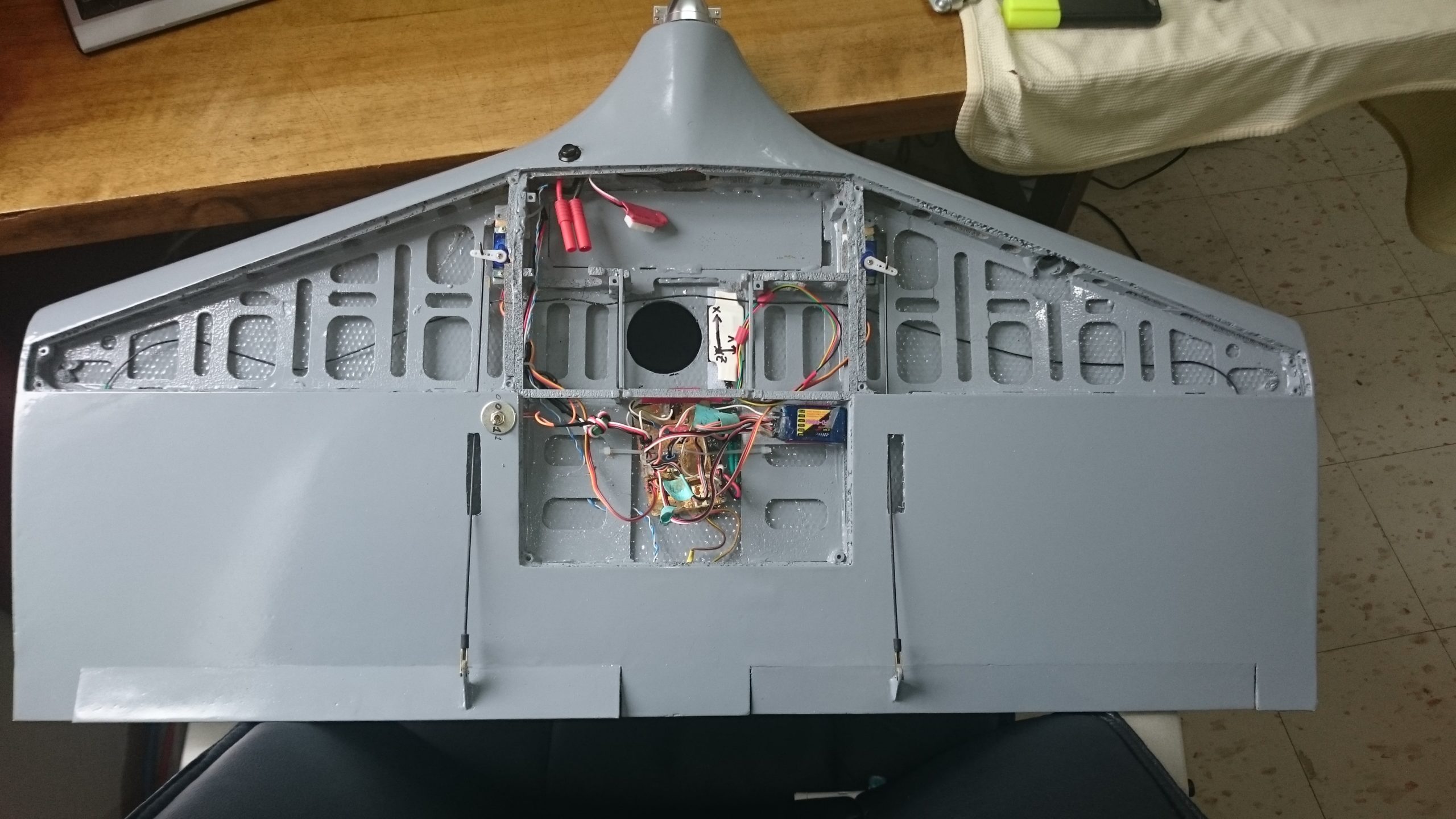
После переезда в Южную Америку возникла необходимость летать в горах, и хорошо известный скайвокер оказался как нельзя кстати:



Последним носителем этого автопилота был SM7 украинского производства. Хорошее, прочное летающее крыло из сотопласта производства ЮжМаша. Но после 2014 года всё сотрудничество по данному проекту закончилось, а южмаш и вовсе перестал продавать сотопласты.

На сегодняшний день комплект полностью устарел, но стал отправной точкой к разработке других, более совершенных моделей.
По всем вопросам обращайтесь в почту sales@dikoy.info или в пишите в комментарии;
Похожие записи






Интересная статья. Интервью в ютубе завлекло сюда. Появилась мысль. Как можно задать вопрос?